
 �ھ��ͷ�
�ھ��ͷ�
 ��I(y��)��
��I(y��)��


1.���ٶ��c��
����C����ͨ�^�ֱ۵��p����̎��������ݔ���D(zhu��n)��/���D(zhu��n)�ٶ��R�_�IJ����������·�����Ƽ��g(sh��)�IJ��ã����F(xi��n)���c�����I(y��)��ռ��(j��)�����Ķ̾��x�����r�g�Ŀs���������������ŷ������Ę��w�S�����r����Mһ����(y��u)����ʹ��ѭ�h(hu��n)�r�g���F(xi��n)�˴���s�p��
2.��(n��i)�þ��|����·
ͨ�^�ϲ��ֱۼ��������IJ�λ���п��O(sh��)Ӌ��ʹ�ÏęC���˻������ֵ�����ǰ�˵ľ��|����·���ԃ�(n��i)������ˣ����x��ʾ�̺͙C�����O(sh��)����ɺ������������÷�ʽ������ęC����֮�g���c��߅�b��֮�g�l(f��)���ľ��|����·���Ć��}�͟o̓���]�����Ķ�����������x��ʾ�̼��F(xi��n)��ʾ�̵����I(y��)Ч����
3.�O(sh��)Ӌ���ɶȵ�����
�c�����C����������O(sh��)����e����������߶ȶ��д���sС�������Ծ��|��ܛ�ܵă�(n��i)�û��O(sh��)Ӌ��ʹ�ÙC���˵ĸ��ܶ��O(sh��)�õ��Ԍ��F(xi��n)��
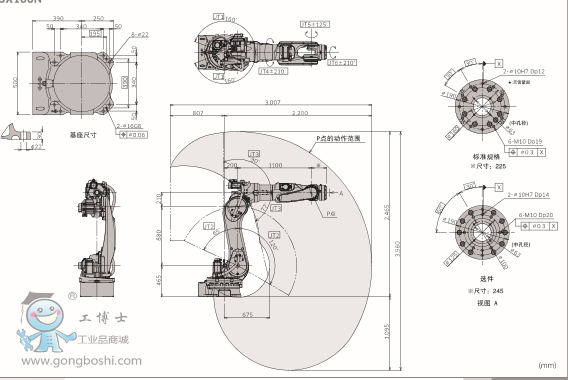
�����������ߴ�
�����������ߴ�



�j(lu��)����")


�j(lu��)110")